
Vulnerable Road Users Detection and Tracking using YOLOv4 and Deep SORT
Over the years, The detection and tracking of Vulnerable Road Users (VRUs) have become one of the most critical features of self-driving car components. Because of its processing efficiency and better detection algorithms, tracking-by-detection appears to be the best paradigm. In this paper, a detection-based tracking approach is presented for Multiple VRU Tracking of video from an inside-vehicle camera in real-time. YOLOv4 scans every frame to detect VRUs first, then Simple Online and Realtime Tracking with a Deep Association Metric (Deep SORT) algorithm, which is customized for multiple VRU
Ternary SRAM circuit designs with CNTFETs
Static random-access memory (SRAM) is a cornerstone in modern microprocessors architecture, as it has high power consumption, large area, and high complexity. Also, the stability of the data in the SRAM against the noise and the performance under the radian exposure are main concern issues. To overcome these limitations in the quest for higher information density by memory element, the ternary logic system has been investigated, showing promising potential compared with the conventional binary base. Moreover, carbon nanotube field effect transistor (CNTFET) is a new alternative device with
Survey on Two-Port Network-Based Fractional-Order Oscillators
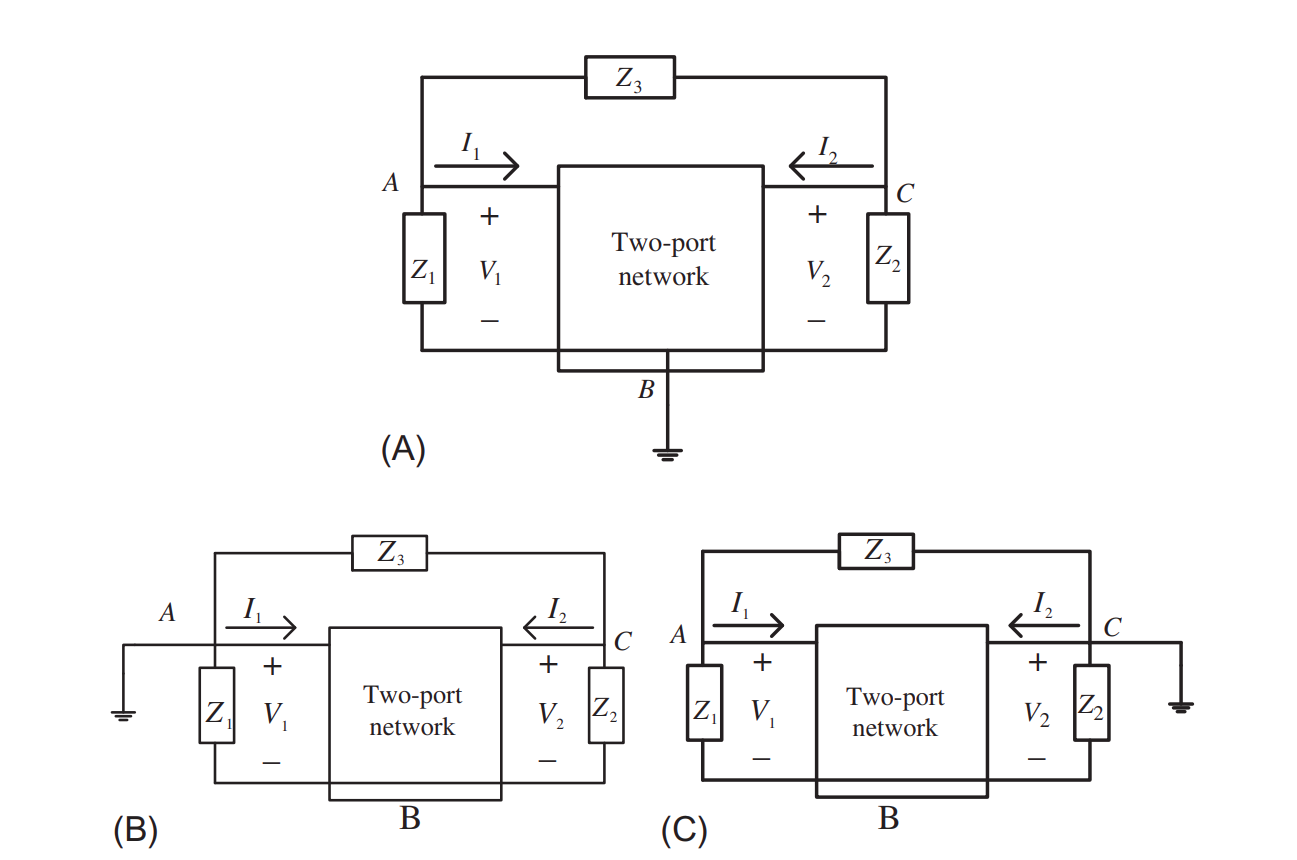
This chapter merges the fractional calculus and two-port networks in oscillator design. The fractional-order elements α and β add extra degrees of freedom that increase the design flexibility and frequency band while providing control over the phase difference. A prototype of the fractional-order two-port network oscillators is introduced. It consists of a general two-port network and three impedances distributed as input, output, and a feedback impedance. Three different two-port network classifications are obtained according to the ground location. This chapter focuses on one of these
Fractional-Order Modeling of Dynamic Systems with Applications in Optimization, Signal Processing and Control: Volume 2 in Emerging Methodologies and Applications in Modelling
Fractional-order Modelling of Dynamic Systems with Applications in Optimization, Signal Processing and Control introduces applications from a design perspective, helping readers plan and design their own applications. The book includes the different techniques employed to design fractional-order systems/devices comprehensively and straightforwardly. Furthermore, mathematics is available in the literature on how to solve fractional-order calculus for system applications. This book introduces the mathematics that has been employed explicitly for fractional-order systems. It will prove an
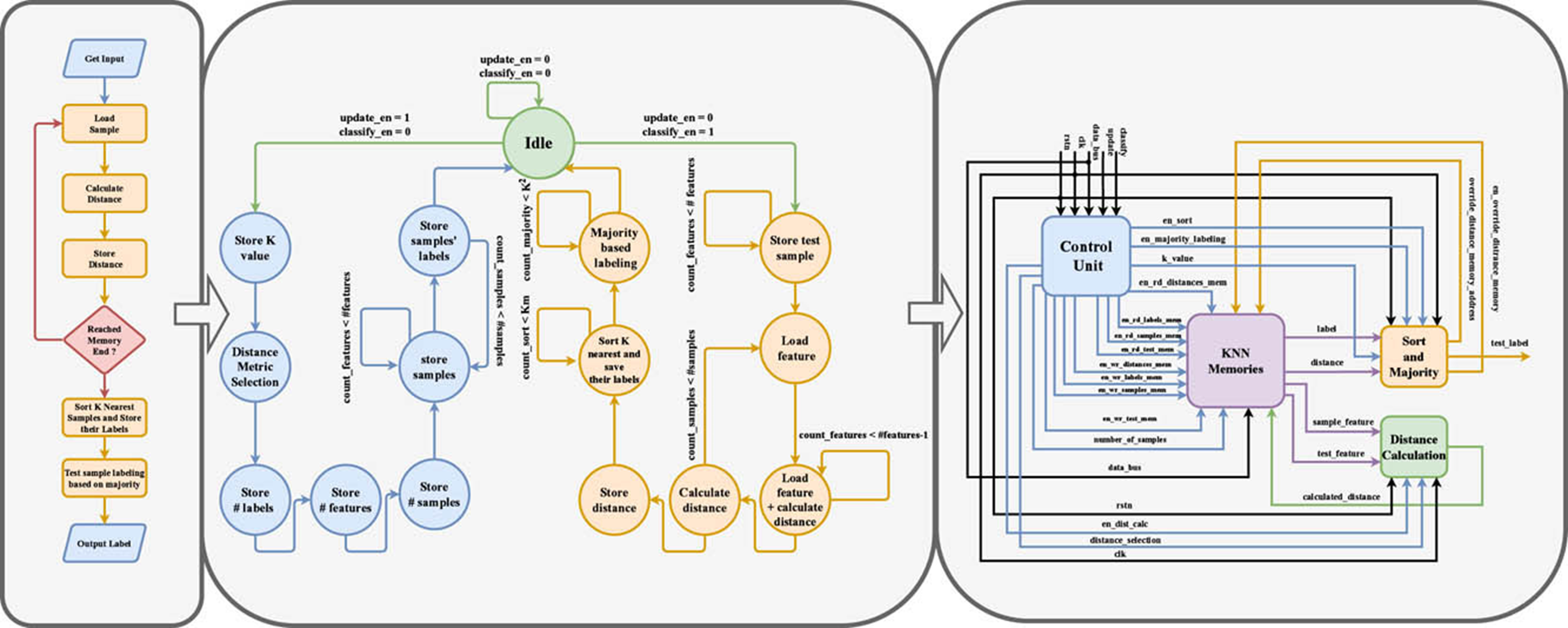
Generic Hardware Realization of K Nearest Neighbors on FPGA
K Nearest Neighbors (KNN) algorithm is a straight-forward yet powerful Machine Learning (ML) tool widely used in classification, clustering, and regression applications. In this work, KNN is applied, with three distance metrics, to classify different datasets, experimentally testing each distance metric effect on the classification performance. A static K is applied for the whole dataset optimally chosen based on a 5-fold cross-validation. A reconfigurable hardware realization on field programmable gate array (FPGA) of each distance metric applying selection sort algorithm is proposed. The
Circuit realization and FPGA-based implementation of a fractional-order chaotic system for cancellable face recognition
Biometric security has been developed in recent years with the emergence of cancellable biometric concepts. The idea of the cancellable biometric traits is concerned with creating encrypted or distorted traits of the original ones to protect them from hacking techniques. So, encrypted or distorted biometric traits are stored in databases instead of the original ones. This can be accomplished through non-invertible transforms or encryption schemes. In this paper, a cancellable face recognition algorithm is introduced based on face image encryption through a fractional-order multi-scroll chaotic
Observability of speed DC motor with self-tuning fuzzy-fractional-order controller
The DC motor is one of the simplest electrical machines used in industry since it is controlled by direct voltages and currents. These configurations have various advantages, allowing the machine to be adapted to the constraints of its specific application. The present chapter analyzes the DC motor with separate excitation without the use of a speed sensor to approximate the rotor speed. An analysis of the stability of the rotor speed estimation is performed. Enhanced control of the direct action is integrated into the adaptive observer to decrease the roundness capability of the model and
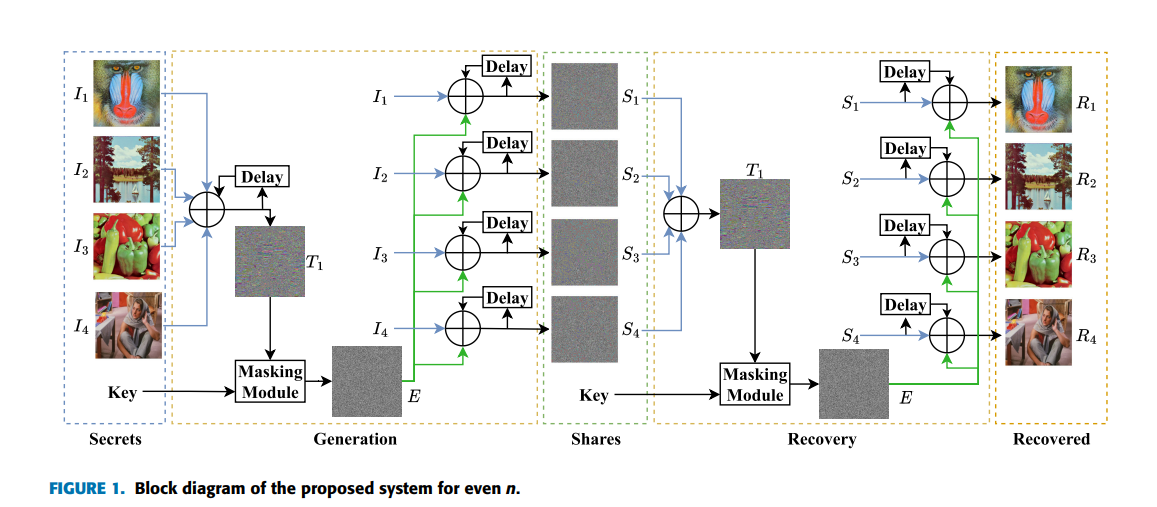
An Efficient Multi-Secret Image Sharing System Based on Chinese Remainder Theorem and Its FPGA Realization
Multi-Secret Image Sharing (MSIS) is important in information security when multiple images are shared in an unintelligible form to different participants, where the images can only be recovered using the shares from participants. This paper proposes a simple and efficient ( n,n )-MSIS system for colored images based on XOR and Chinese Remainder Theorem (CRT), where all the n share are required in the recovery. The system improves the security by adding dependency on the input images to be robust against differential attacks, and by using several delay units. It works with even and odd number
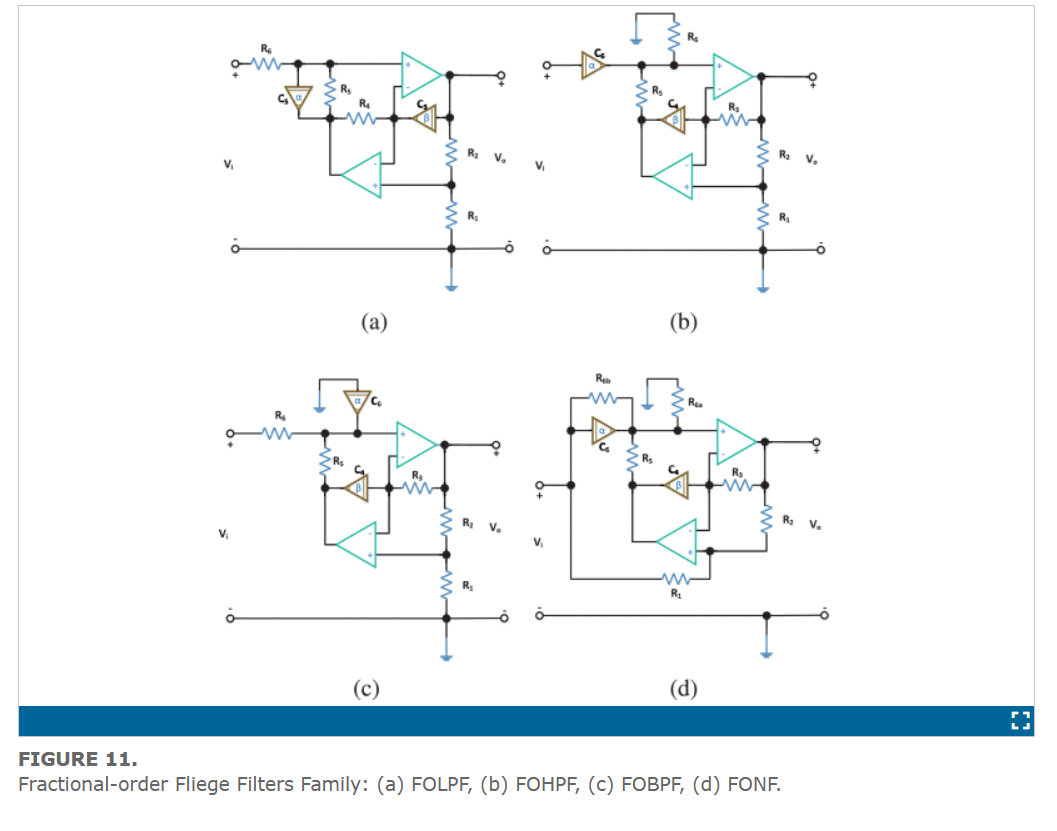
On the Design Flow of the Fractional-Order Analog Filters Between FPAA Implementation and Circuit Realization
This work explicitly states the design flows of the fractional-order analog filters used by researchers throughout the literature. Two main flows are studied: the FPAA implementation and the circuit realization. Partial-fraction expansion representation is used to prepare the approximated fractional-order response for implementation on FPAA. The generalization of the second-order active RC analog filters based on opamp from the integer-order domain to the fractional-order domain is presented. The generalization is studied from both mathematical and circuit realization points of view. It is
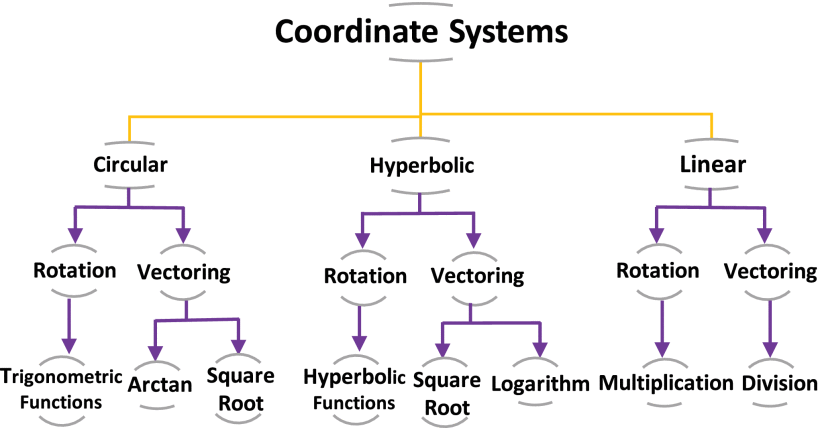
FPGA Implementation of Reconfigurable CORDIC Algorithm and a Memristive Chaotic System with Transcendental Nonlinearities
Coordinate Rotation Digital Computer (CORDIC) is a robust iterative algorithm that computes many transcendental mathematical functions. This paper proposes a reconfigurable CORDIC hardware design and FPGA realization that includes all possible configurations of the CORDIC algorithm. The proposed architecture is introduced in two approaches: multiplier-less and single multiplier approaches, each with its advantages. Compared to recent related works, the proposed implementation overpasses them in the included number of configurations. Additionally, it demonstrates efficient hardware utilization